Instalação Ditador fez parte da exposição “Abílio-José Santos. Revelação: Concretos e Visuais” aberta ao público de 4 de julho a 8 de setembro de 2019 no Fórum Maia.
The interactive installation Ditador was at the “Abílio-José Santos. Revelação: Concretos e Visuais” exhibition from July to September 2019.
This installation was developed by Grifu, Luís Aly and Marco Jerónimo using eMotion, Qlab, Kinect.
The paper “Solitária – Gestural Interface for Puppetry Performance” was presented today (10.03.2020) at the fifth International Conference on Live Interfaces in Trondheim, Norway.
The program can be accessed in https://live-interfaces.github.io/liveinterfaces2020/program/
Solitária is a performance-play that explores the human Loneliness in the solitary confinement imagining the behavior of a prisoner through is mind and body. Our body is the only connection to the physical world, the only sensor capable to recognize the physical space. However, our sensorial capabilities begin to misbehave and soon we became disorientated.
Debut’s on 9th November 2017 – 21h30 – Blackbox d’O Espaço do Tempo.
Other performances in 10th and 11th November at 21h30 – Blackbox d’O Espaço do Tempo.
Solitária follows the performance-play approaches which characterizes the work developed by Alma d’arame from its beginning. Each work starts inside a delimited space, inside it’s own confinement. In one hand, the space of narrative, theater, puppet, being and object and, on the other, the space of programming, kinetics, multimedia. Starting from the solitary and creative space of each one, we saw the common space of creation born. We all have and need that time with ourselves. It is in this time that we find the space of each one, which is ours alone, and where we can relive memories, hide, think, feel, register. Here we will reach own states. That is what this performative act is all about.
It is in this laboratory space that this solitary confrontation between man and machine, between real and virtual, unfolds, and it is this confrontation that will lead us to experimentation and the search for new narratives.
The kinetic movement of the body and how it occupies the empty space will build this visual and sound narrative.
Art team
Direcção artística | Amândio Anastácio;
Interpretação | Susana Nunes;
Multimédia | Luís Grifu;
Música | João Bastos;
Marioneta | Raul Constante Pereira;
Desenho de luz e Espaço cénico | Amândio Anastácio;
Desenho de luz e montagem | António Costa;
Direcção de Produção | Isabel Pinto Coelho;
Assistente de Produção | Alexandra Anastácio;
Fotografia | Inês Samina;
Vídeo | Pedro Grenha;
Production | Alma d’Arame
Apoio | Câmara Municipal de Montemor-o-Novo .
Parceria | Espaço do Tempo .
Estrutura Financiada por | Dgartes e Governo de Portugal
Virtual Marionette puppet tools were used to develop several interactive installations for the animation exhibition Animar 12 at the cinematic gallery Solar in Vila do Conde. The exhibition was debuted in the 18th of February of 2017.
Faz bem Falar de Amor
An interactive installation that challenges the participants to interpret with virtual characters some of the scenes from the animation music clip developed by Jorge Ribeiro for the music “Faz bem falar de amor” from Quinta do Bill.
Puppit tool was adapted to drive two cartoon characters (a very strong lady and a skinny young man) using the body motion of the visitors with with one Microsoft Kinect. The virtual character skeletons differ from the human body proportions. Thus, there are distinct behaviors on each puppet that do not mirror exactly the participant movement. Although our intention was to present this challenge to the participant for him to adapt his body to the target puppet we help him a little bit. To solve this discrepancy, I used two skeletons. A human like skeleton is mapped directly to the performer”s body. Then, the virtual character skeleton is mapped to the human clone skeleton with an offset and scale function. In this way, it was possible to scale up and down the movement on specific joints from the clone skeleton and make the virtual character behave more natural and cartoonish. This application was developed using Unity, OpenNI and Blender.
É Preciso que eu Diminua
This animation music clip was developed by Pedro Serrazina for Samuel Úria. It describes the story of a character that suffers from a scale problem transcending the size of the buildings. The character tries to shrink placing the arms and legs near to is body. On the other hand there is the need to free from the strict boundaries and expand all the things around him. To provide the feeling of body expansion pushing the boundaries away from his body the visitor drives a silhouette as a shadow with a contour line around him that grows when the participant expands his body and shrinks when he reduce his size. The silhouette captured by a Microsoft Kinect is projected on a set of cubes that deform the body shape. This application was developed with Openframeworks with ofxKinect and ofxOpenCV.
Estilhaços
For this short animation film produced by Jorge Miguel Ribeiro that addresses the portuguese colonial war there was the intention to trigger segments of the film when the visitor place his body above a mine. Two segments of the film show two distinct perspectives from the war, one from a father that experienced the war and the other from his child that understood the war through the indirect report of his father. A webcam was used to capture the position of the visitor”s body and whenever his body enters the mine space it sends an OSC message with a trigger to a video player application. Both video trigger and video player applications were developed with Openframeworks.
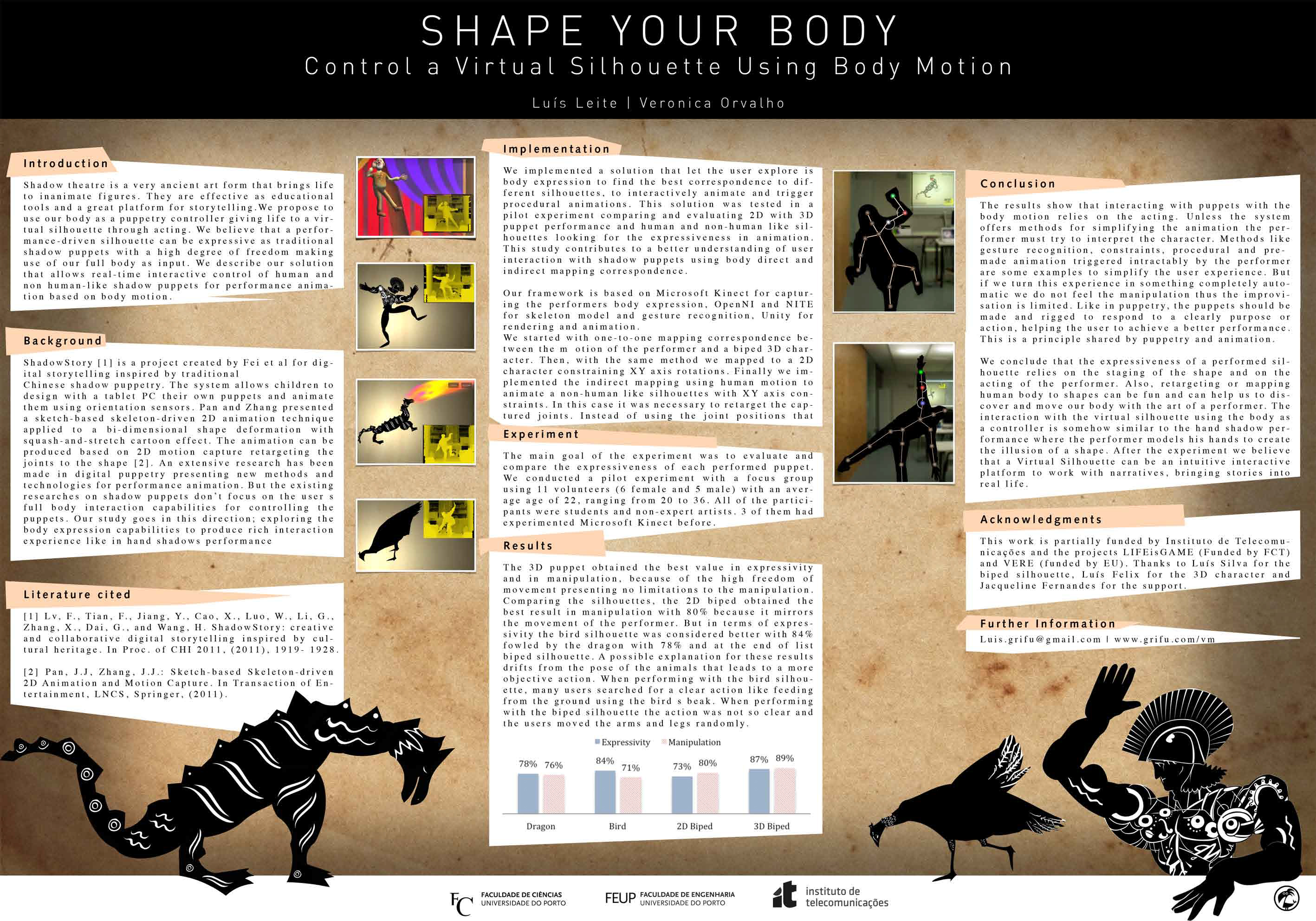
Shape Your Body is a multi-platform digital puppetry application that allows to manipulate silhouette puppets with the body. It makes use of low-cost motion capture technology (Microsoft Kinect) to provide an interactive environment for performance animation. It challenge the user to explore his body as marionette controller, in this way, we get to know a little better our body.
This project brings the art of shadow puppetry into the digital performance animation.
Shadow theatre is an ancient art form that brings life to inanimate figures. Shadow puppetry is great environment for storytelling. Thus, our objective was to build a digital puppetry tool to be used with non expert-artists to create expressive virtual shadow plays using body motion. A framework was deployed based on Microsoft Kinect using OpenNI and Unity to animate in real-time a silhouette. We challenge the participants to play and search the most adequate body movement for each character.
Requirements to run this application
– PC / Mac computer
– OpenNI drivers version 1.5 (you can find the Zigfu drivers above)
– Microsoft Kinect sensor
With BodyPuppetry the users body is the puppet controller, producing performance animation with body motion. We challenge the participants to explore their bodies to give life to puppets that are different from human morphology as if they were using hand shadows to create imaginative figures.
BePuppit: BodyPuppetry is an interactive application that explores the potential of the body motion to drive virtual puppets in particular silhouettes.
Users are challenged to deconstruct their bodies and use it as a marionette controller to drive silhouettes. Because this puppets are in two dimensions the player needs to find the body poses that work best with the puppets. I call this search for the best pose the distance of manipulation. The more direct is the manipulation (when the manipulated subject mirrors the puppeteer) the more acting skills are needed, puppetry skills are needed when this distance increases.
BODYPUPPETRY is part of a digital puppetry research called Virtual Marionette.
BodyPuppetry challenges the participant to use his body as a puppetry controller, giving life to a virtual silhouette through acting.
Inspired by traditional marionette methods, such as shadow puppetry, the project goal is to study novel interfaces as digital puppetry controllers for performance animation. In this particular case the challenge was to deconstruct our body as if it was a marionette controller to give life to non-human silhouettes figures. There is also a human-like 3D model for comparison purposes. This project was used for an experimental study with the purpose of understanding how non-expert artists would behave with their bodies when challenged to control silhouette figures.
Implementation
This application was developed for Microsoft Kinect device using the OpenNI wrapper for Unity. NITE gestures were used to drive a virtual cursor allowing to control the interface with the hands. (in this release, only the Windows version work with NITE)
Requirements
– PC/MAC with OpenNI drivers (version 1.5)
– Microsoft Kinect sensor
If you need the drivers you can download the Zigfu for Mac or Windows available on the file section
Acknowledgements
Thanks to Luís Silva (the author of the Hercules figure), Luís Felix (author of the Punch character), Marcelo Lafontana for all the puppetry support and knowledge, to Sónia Barbosa, Vasco Barbosa, Marta Barbosa for being my inspiration.
This project was developed and released in 2012 by Luís Leite (Aka GRIFU) for the Digital Media PhD. For more information please visit WWW.VIRTUALMARIONETTE.GRIFU.COM
BePuppit is a set of tools, applications and experiments based on interaction methods and techniques to drive and manipulate digital performing objects with our body.
Mapping the human body limbs to digital subjects is not trivial, in particular when mapping our body to digital models that present non-human morphology.
PUPPIT – Play with Virtual Puppets
Inspired by the traditional puppetry we challenge the participants to explore their bodies as marionette controllers by playing with puppets. This performance-driven animation projects explores different digital puppetry methods presenting new ways to interact with virtual puppets.
PUPPIT consists in a several prototypes that are the work-in-progress of a PhD research called “Virtual Marionette – Interaction Model for Digital Puppetry”. The goal of the prototypes is to explore and evaluate different rigging, mapping and interaction methods, and to develop tools for artists and non-expert artists that can be used in as collaborative environment for storytelling – making live narratives.
For any of the projects based on Kinect you should download and install OpenNI 1.5.
Here are two simple installation packages developed by ZigFu that provide OpenNI drivers in a very straight way. Just download and install and that´s it, you can start using the Microsoft Kinect.